Announcement: Kansai Physical AI Young Researchers Meetup
Kansai Physical AI Young Researchers Meetup
We are hosting a joint event organized by three Physical AI-related communities in Kansai. The program will cover a wide range of topics, from introductory talks to advanced research presentations, and will also include an invited faculty lecture.
Date & Time: Saturday, July 11, 2026, 14:00-18:00
Format: On-site
Participation Fee: Free
Eligibility: Open to all
Contact: contact@kupac.org
🎯Overview
KUPAC, OPAN, and the Osaka University AI Robotics Circle will come together for a young researcher exchange event in Physical AI. The program features both practical and research-oriented sessions, including imitation learning, foundation models, and multi-robot dialogue systems.
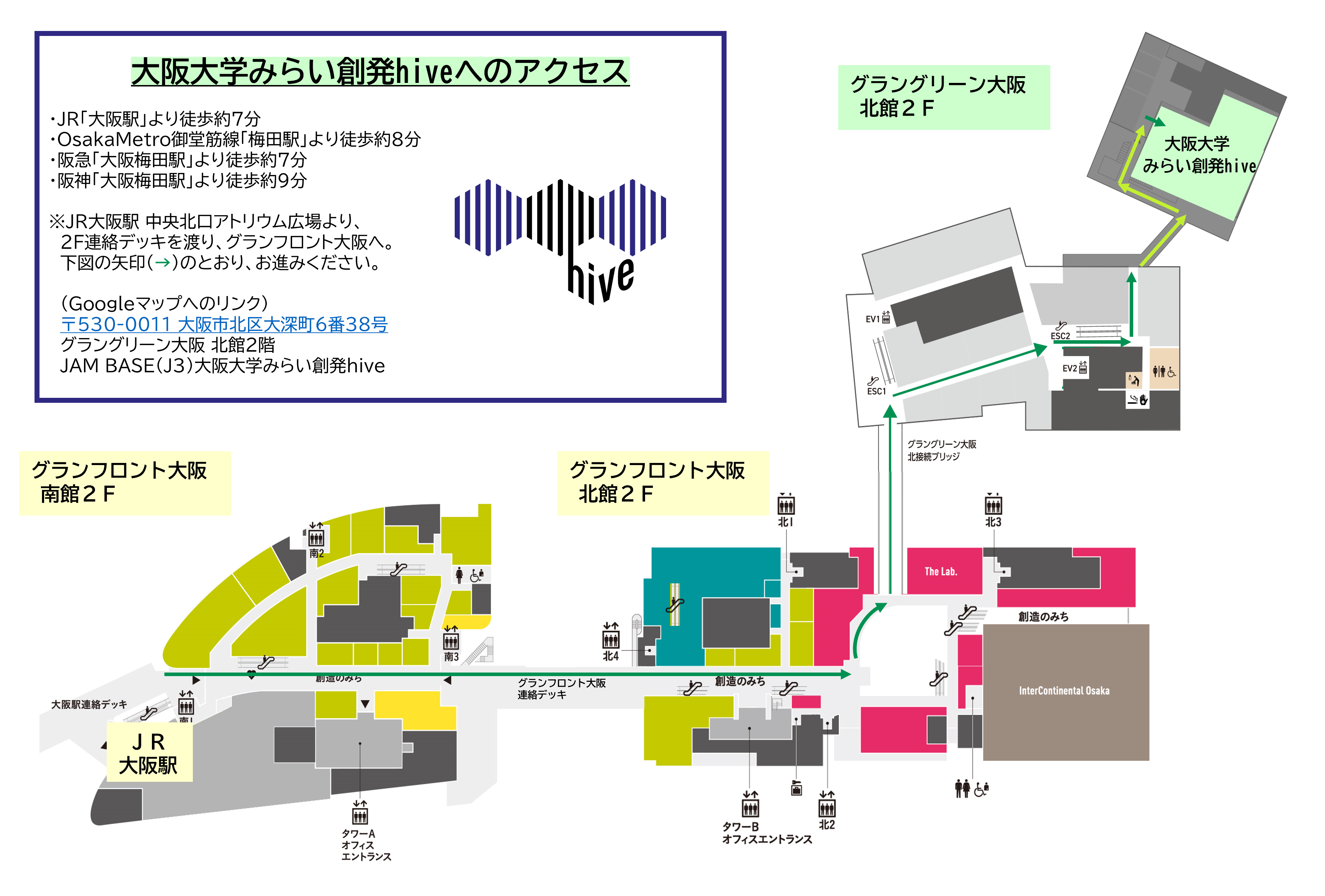
🗺️Venue Access Map
Please check the access map below before coming to the venue.
⏰Timetable
🎤Presentation Details
Kenryo Hiratsuka, M1, Graduate School of Informatics, Kyoto University
From Fundamentals of Imitation Learning to Manipulation Tasks Leveraging Audio Information
In recent years, imitation learning has enabled robots to learn complex manipulation tasks. However, the use of non-visual information, such as contact sounds and ambient audio, is still underexplored. This talk introduces the fundamentals of imitation learning and applications to manipulation tasks that leverage audio cues.
Shogo Yanagida, D1, Graduate School of Engineering Science, Osaka University
Foundation Models and Humanoid Robots
With the rapid development of foundation models such as VLA, robots are increasingly capable of understanding language instructions and acting based on visual information. This talk introduces robotics foundation-model technologies that have evolved primarily for manipulators and discusses their potential applications to humanoid robots, with a focus on mobile manipulation and whole-body behaviors.
Yota Hatano, D3, Graduate School of Engineering Science, Osaka University
Developing a Multi-Agent Dialogue Robot Collaboration System to Enhance Influence in Customer Service Tasks
Teleoperated robots are beginning to be used in customer service and guidance, but limited influence on customers remains a challenge. This talk introduces a system in which a single operator coordinates multiple dialogue robots to improve communication impact and persuasiveness in customer-service scenarios.
Hiyotaka Asai, Project Assistant Professor, Graduate School of Engineering Science, Osaka University
Toward Connecting Embodied Intelligence and AI Robotics
The study of bodily control in living organisms, including humans, has long been a core topic in robotics. In this context, the idea that not only the brain or controller but also the body itself plays an intelligent role has developed and been discussed as embodied intelligence. In this talk, through concrete examples of embodied intelligence and bio-inspired robotics, we will discuss how these insights can be connected to modern AI robotics and how they can be positioned to complement the weaknesses of AI robotics.
Registration Form
If you would like to attend, please register in advance using the form below.
Register Here