関西フィジカル AI若手交流会 開催のお知らせ
関西フィジカル AI若手交流会
関西のフィジカルAI関連3団体による合同イベントを開催します。各団体による入門的な発表から本格的な研究紹介まで、幅広い内容を予定しており、教員による招待講演も企画しています。
日時:2026年7月11日(土) 14:00-18:00
開催形式:対面
参加費:無料
参加資格:なし
お問い合わせ:contact@kupac.org
🎯イベント概要
KUPAC、OPAN、阪大AIロボット研究会の3団体が連携し、フィジカルAI分野の若手交流イベントを実施します。模倣学習、基盤モデル、対話ロボット連携など、実践と研究の双方に触れられるプログラムを予定しています。
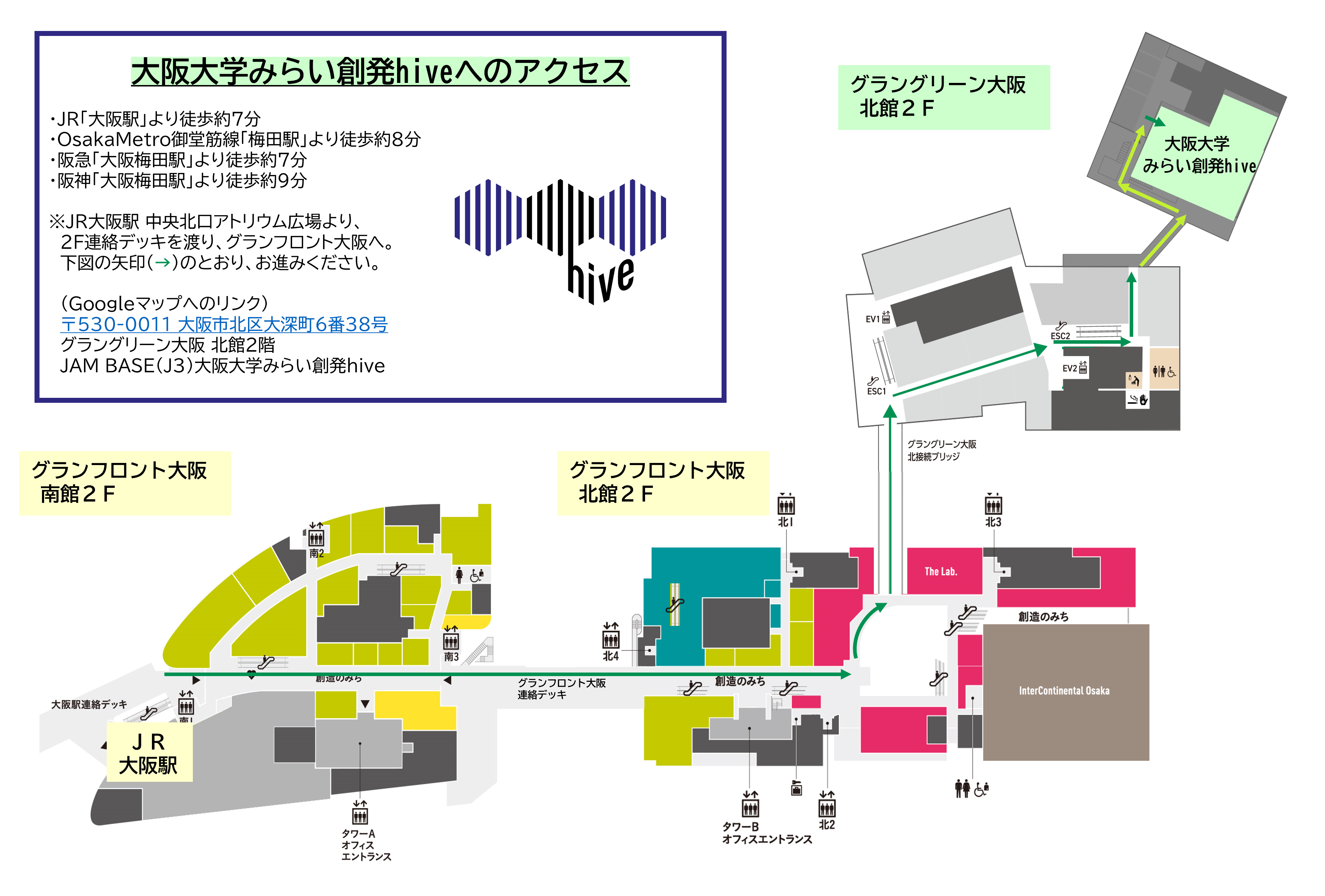
🗺️会場アクセスマップ
当日は以下のアクセスマップをご参照のうえご来場ください。
⏰タイムテーブル
🎤発表内容詳細
京都大学情報学研究科 修士課程1年 平塚謙良
模倣学習の基礎から、音情報を活用したマニピュレーションタスクの実践まで
近年、模倣学習によりロボットは複雑なマニピュレーションタスクを学習できるようになってきました。一方で、物体接触音や環境音などの非視覚的情報の活用はまだ十分に進んでいません。本講演では、模倣学習の基礎と、音情報を活用したマニピュレーションタスクへの応用を紹介します。
大阪大学大学院基礎工学研究科 博士後期課程1年 柳田栞吾
基盤モデルとヒューマノイドロボット
近年、VLAなどの基盤モデルの発展により、ロボットは言語指示を理解し、視覚情報をもとに行動する能力を高めつつあります。本発表では、マニピュレータを中心に発展してきたロボット基盤モデルの技術を紹介し、それらをヒューマノイドロボットへ応用する可能性について考えます。特に、移動を伴う操作や全身を使った行動に注目し、最近の研究動向をわかりやすく紹介します。
大阪大学大学院基礎工学研究科 博士後期課程3年 波多野遥太
接客タスクにおける影響力を強化する複数体の対話ロボット連携システムの開発
遠隔操作ロボットは接客や案内で活用され始めていますが、顧客に与える影響力の不足が課題です。本発表では、一人の操作者が複数体の対話ロボットを連携させ、接客場面における伝達力や説得力を高めるシステムについて紹介します。
大阪大学大学院基礎工学研究科 特任助教 浅井飛鷹
招待講演
(後日公開)