Imitation Learning (ACT) using SO-100 Robot Arm and LeRobot Library
6 participants
Meeting Room C, 4F, International Science Innovation Building, Kyoto University Main Campus
1st Hands-on
Introduction to Physical AI Programming
Overview
This is a hands-on session to learn the basics of imitation learning using the affordable SO-100 robot arm and LeRobot library. We conducted everything from data collection to training and verification on the actual machine. In the actual machine verification, we confirmed performance exceeding expectations, such as success even with workpieces of colors not in the training data, realizing the strength of ACT.
Practice Content
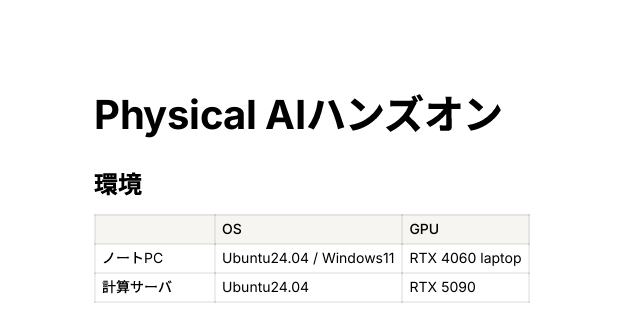
- • SO-100 and environment setup
- • LeRobot library environment setup
- • Data collection and dataset creation
- • ACT training
- • Policy verification on real machine
- • Visualization and discussion of attention maps
Materials
📄Hands-on Materials
📄Hands-on Manual
Gallery

Scene of data collection (1)

Scene of data collection (2)

Scene of hands-on
* Click photo to enlarge