SO-100ロボットアームとLeRobotライブラリを用いた、模倣学習(ACT)
6名参加
京都大学本部構内 国際科学イノベーション棟 4F ミーティングルームC
講師: 工学部・平塚
重要な注意事項
実習資料の二次頒布(転載・再配布・SNSでの共有等)は禁止します。
個人の学習目的での利用は問題ありませんが、第三者への共有はご遠慮ください。
第1回ハンズオン
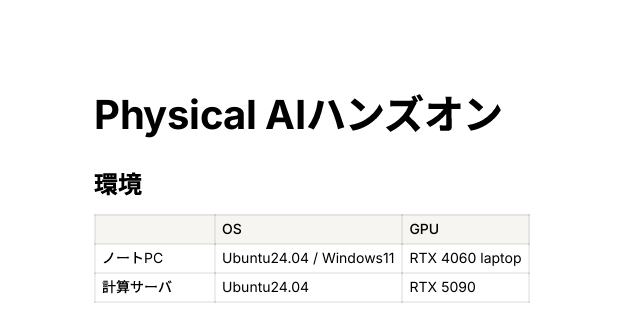
Physical AIプログラミング入門
概要
安価なSO-100ロボットアームとLeRobotライブラリを用いて、模倣学習の基礎を学ぶハンズオンです。 データ収集から学習、実機での検証までを実施しました。 実機検証では学習データにない色のワークでも成功するなど、想定以上の性能が確認され、ACTの強さを実感できました。
実習内容
- • SO-100と環境のセットアップ
- • LeRobotライブラリの環境構築
- • データ収集・データセットの作成
- • ACTの学習
- • 実機でのポリシー検証
- • アテンションマップの可視化と考察
実習資料
📄ハンズオン資料
📄ハンズオン手順書
ギャラリー

データ収集の様子(1)

データ収集の様子(2)

ハンズオンの様子
※ 写真をクリックすると拡大表示されます